作为智能手机的三大创新之一,3D ToF深度传感技术依靠体积小、误差低、直接输出深度数据与抗干扰性强等优势,成为近年来智能手机上的关键创新亮点之一。
ToF技术解码
ToF是Time of Flight的缩写,又称飞行时间法3D成像。这种成像技术通过向目标****连续的特定波长的红外光线脉冲,通过特定传感器接收待测物体传回的光信号,计算光线往返的飞行时间或相位差得到待测物体的3D深度信息,ToF相机的亮度图像可以通过模型迅速连接起来。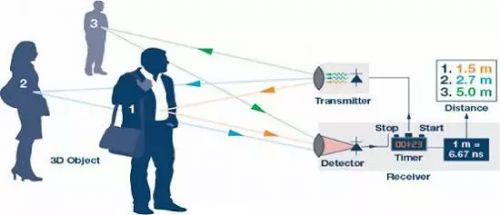
相比3D深度视觉其它两种方案(结构光与双目立体成像技术)而言, ToF方案在实际应用中的优势显著。例如:在画面拍摄后计算景深时不需要进行后处理,既可避免延迟又可节省采用强大后处理系统带来的相关成本;ToF测距规模弹性大,大多数情况下只需改变光源强度、光学视野以及****脉冲频率即可完成;由于具有不易受外界光干扰、体积小巧、响应速度快以及识别精度高等多重优势,使得ToF无论是在移动端还是车载等应用领域日渐成为3D视觉的首选技术方案。目前,ToF技术应用领域广泛,包括:
消费电子:虚拟现实、人脸识别、体感交互等新零售:手势识别、客流统计、行为识别等智能安防:人脸识别、行为分析等工业级自动化:自动避障、测量测距、感知定位等医疗电子:增强现实、远程交互等汽车电子:辅助驾驶、人脸识别、手势识别等
TOF测量原理
TOF飞行时间,即传感器发出经调制的近红外光,遇物体后反射,传感器通过计算光线****和反射时间差或相位差,来换算被拍摄景物的距离,以产生深度信息,此外再结合传统的相机拍摄,就能将物体的三维轮廓以不同颜色代表不同距离的地形图方式呈现出来。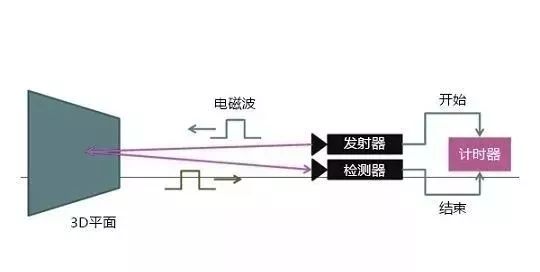
****的红外光线被被测物体反射后回到传感器,内置的计时器记录其来回时间,然后即可计算出其距离。听起来好像和大家玩烂了的超声波测距没啥不同。但其实不然,超声波测距对反射物体要求比较高,面积小的物体,如线、锥形物体就基本测不到,而TOF红外测距完全可克服此问题,同时TOF测距精度高,测距远,响应快。
这种技术跟3D激光传感器原理基本类似,只不过3D激光传感器是逐点扫描,而TOF相机则是同时得到整幅图像的深度信息。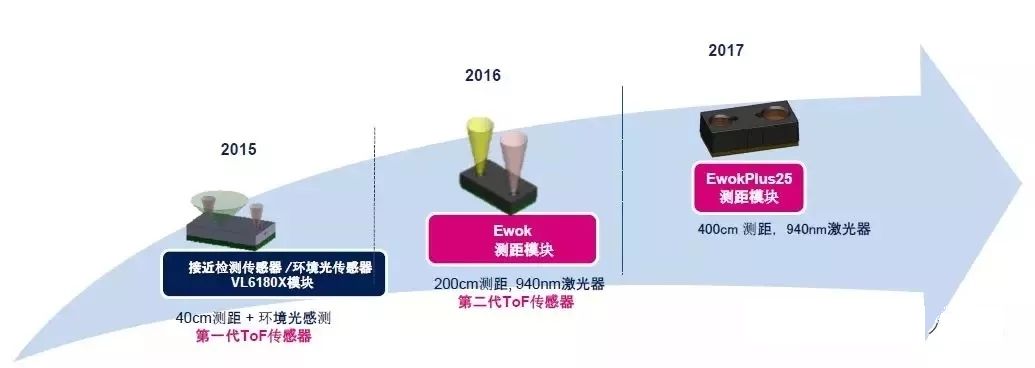
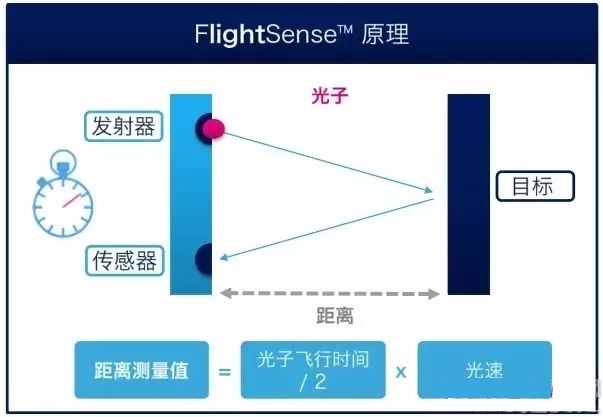
ToF的原理是通过光子的反射测距。传统上是红外测距,但红外测距没有计算时间差的能力,主要靠测光强,但打在黑色、白色等颜色物体上,由于材料本身的吸收度不同,也会影响测距效果,因此ST的FlightSense采用计算****和返回的光子时间差,即计算飞行时间(ToF)方案。另外在集成度上,ST的方案是****和接收都做在一起,而红外测距往往是分立方案。
| 第一代 VL6180X | 第二代 VL53L0X | 第三代 VL53L1X |
| 测距 | 40cm | 2m | 4m |
| 激光器 | 850nm | 940nm | 940nm |
| 视场角 | 25° | 25° | 27° |
| 环境光感测 | 有 | 无 | 无 |
| 测距精度 | ±10mm | ±3% | ±1%
|
市面上有多家公司采用ToF方法,但主要采用相位测距法,主要用于工业,原理是脉冲计算法,但在波谷的能量就不测量了,会造成能量损失。
为何ST方案的测距角度都是25°?因手机镜头弧度是25°左右,所以市面上的产品往往是25~30°视角。FlightSense二代之所以是2米测距,因手机拍摄的理想距离是1.2~1.5米。
市面上有多家公司采用ToF方法,但主要采用相位测距法,主要用于工业,原理是脉冲计算法,但在波谷的能量就不测量了,会造成能量损失。
飞行时间(ToF)传感系统是最有盈利空间的创新成像技术之一。市场上的主要消费类产品制造商都希望在各种智能硬件中集成飞行时间(ToF)测距,以提供3D成像、接近感应、环境光感测、手势识别等功能。
意法半导体在飞行时间(ToF)传感方面潜心研究,而iPhone 7 Plus中的飞行时间(ToF)测距传感器是意法半导体为苹果公司定制的产品。
这款为苹果定制的产品位于iPhone手机前面、主扬声器上方,采用光学栅格阵列(LGA)封装形式,尺寸为2.8mm x 2.40mm,小于意法半导体对外公开销售的任一款ToF传感器。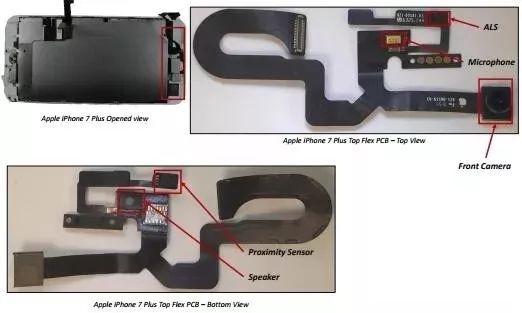
苹果iPhone 7 Plus拆解
ToF究竟是未来趋势还是厂商套路既然 TOF 的历史已经如此悠久,为啥近一年才成为消费电子的热词呢?
因为概念出现了混淆,如今热议的 TOF 技术其实应该叫 TOF 3D 技术,属于 3D 视觉技术的一种,目标是和 2D 相机配合建立物体和空间的立体模型,而之前的 TOF 只是点光源,只是用于测量前方物体距离有多远而已,无论从实现目标还是复杂度来说都不能相提并论。
此外,有关 TOF 3D 的基本原理还是要再简单讲一下,首先通过红外光源,打出超短的脉冲信号,形态是面光,要求覆盖整个视场范围,然后通过红外相机接收反射信号,在成像的同时也获得了空间内每个点收发信号的时间差,最后通过光速计算出距离,就能搞定视场内整个空间的 3D 轮廓。
当然,理论都是很美好的,否则没人会愿意推进它们的实用化,尤其对大家伙们来说,如今的产品做到了什么程度才是关键。
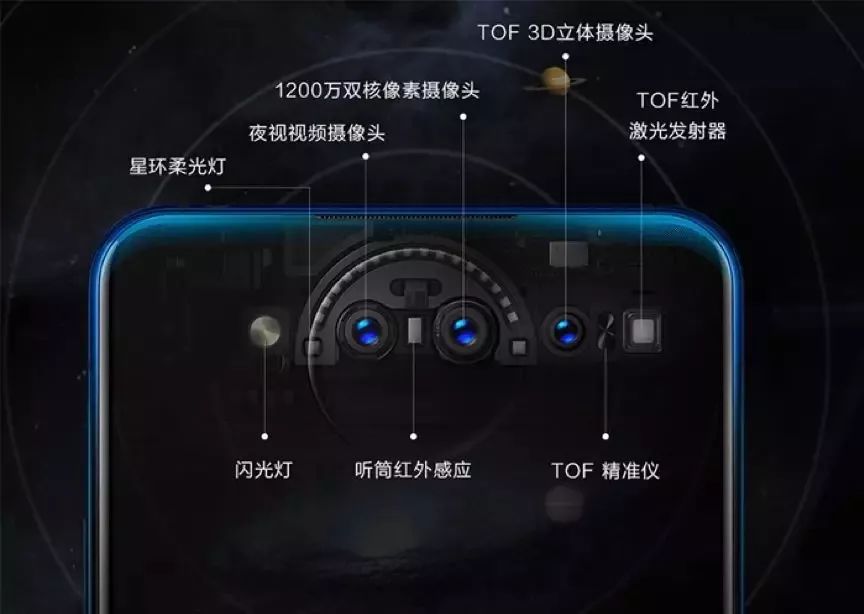
好在这件事分析起来不难,因为目前主流市场上用 TOF 3D 的产品也就三款,一个“前置”是 vivo NEX双屏版,两个后置,OPPO R17 Pro 和华为荣耀 V20。接下来我们逐个分析。
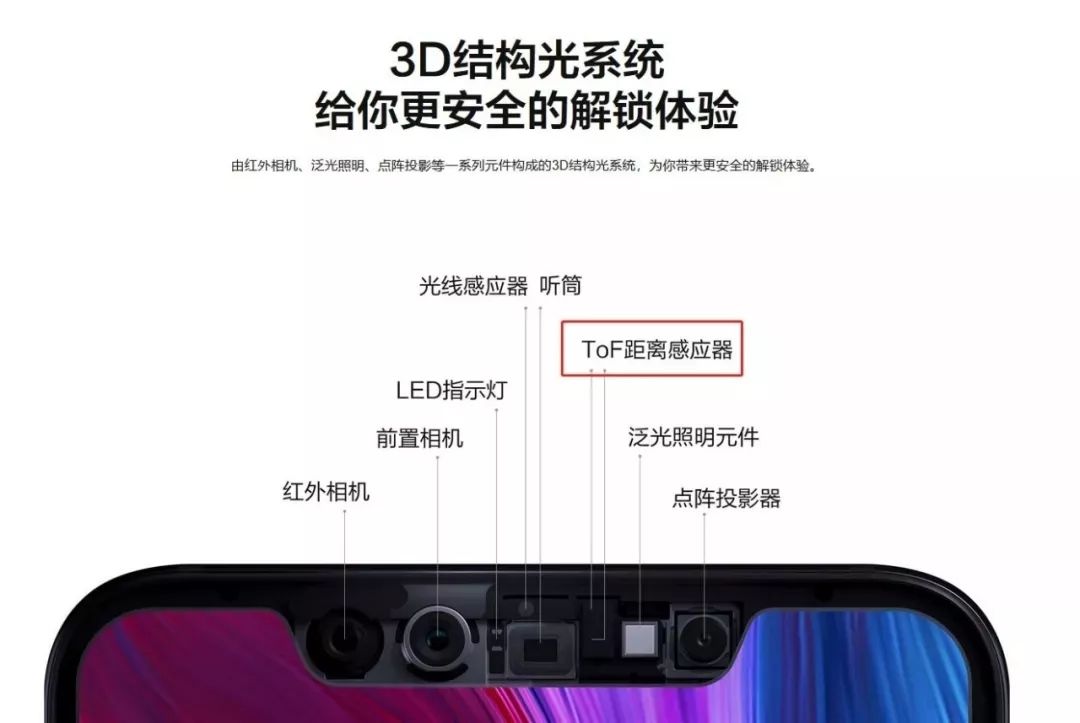
vivo NEX 双屏版官方说的很明确,TOF 就是拿来搞面部识别用的,和结构光一个玩法。模组上的合作伙伴是艾德诺半导体(ADI),型号是 ADDI9036,镜头光圈 f/1.3,再就没有其他的公开资料。不过从 ADI 以往展出的产品来看,最近的是 ADDI9033,用于工业机械臂,sensor 分辨率是 VGA(640*480) 水准,这样可以推知 9036 应该是 9033 的衍生版本。
其中值得一提的是,对于前置面部识别来说,行业内主流的选择是结构光,原因各家有多次科普,这里就简单提一下,即在正常使用距离(0.2-1.2m),结构光的深度精度明显比 TOF 更有优势,TOF 则需要更远一些才能发挥。这很好理解,毕竟距离太近的话,精度需求也更细微,信号来回时间太短,甚至接近于信号本身的脉冲长度,算起来误差就会很大,而距离变长的话,结构光实际有效的采集点会变少,单个斑点面积会变大,精度当然也会有明显的损失。不过从实际产品来看,vivo NEX 至少接入了支付宝的面容支付,说明安全性上用起来并没啥问题。

而在构造上,从实际产品来看,TOF 面部和结构光都是 3 个必需元器件,但不同在于,结构光需要点阵投影器和红外相机拉开一定的距离,因此它们在所有产品上都是分居左右两侧的,而 TOF 没这种需求,因而相对来说堆叠比较简单。
至于 vivo 官方所宣称的“TOF 精度是结构光的 10 倍”,则应该是指其 sensor 的 VGA 分辨率,640*480=307200 正好 30 万像素,是结构光 3 万个点阵的“10 倍”。不过这很显然是偷换概念,毕竟结构光的点阵和 sensor 的分辨率并不能混为一谈,真要论起来,结构光阵营最低端的 OV9282 都有 100 万像素,数量碾压 TOF,而高端 TOF sensor 用的 IMX456QL,单像素尺寸 10μm,反过来又碾压了结构光普遍的 3μm,你说这事该咋整? *博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。
