▍飞行时间3D成像
TOF成像可用于大视野、远距离、低精度、低成本的3D图像采集,其特点是:检测速度快、视野范围较大、工作距离远、价格便宜,但精度低,易受环境光的干扰。例如Camcueb3.0可靠的深度精度(<3mm @ 4m),每个像素对应一个3D数据。
线结构光扫描三维点云生成示意图
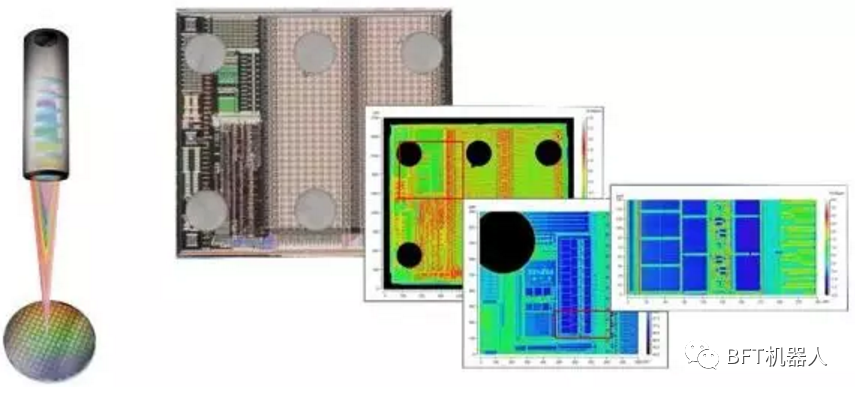
色散共焦扫描三维成像示意图
立体视觉可分为被动成像和主动成像两种形式。
被动视觉成像依赖相机接收到的由目标场景产生的光辐射信息,常用于特定条件下的3D成像场合,如室内等光线变动不大的场景,或几何规则明显,控制点比较容易确定的工业零部件等。
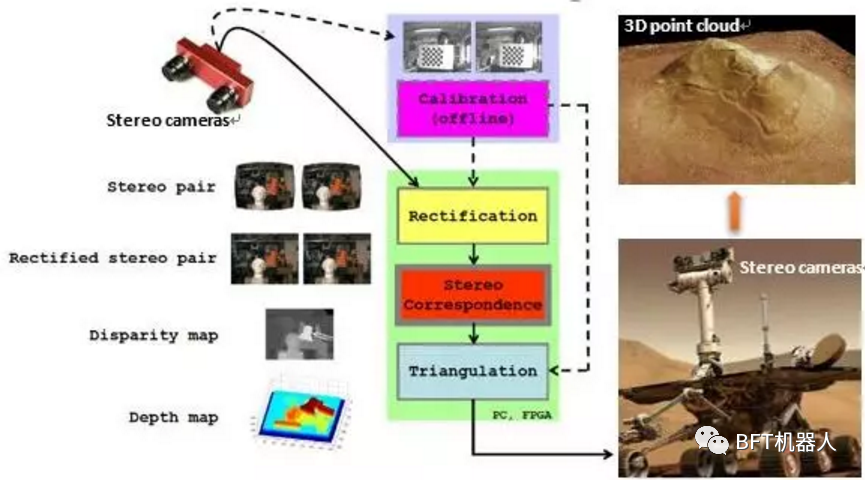
主动立体视觉是利用光调制(如编码结构光、激光调制等)照射目标场景,对目标场景表面的点进行编码标记,然后对获取的场景图像进行解码,以便可靠地求得图像之间的匹配点,再通过三角法求解场景的3D结构。主动立体视觉的优点是抗干扰性能强、对环境兼容性强(如通过带通滤波消除环境光干扰),3D测量精度、重复性和可靠性高;缺点是对于结构复杂的场景容易产生遮挡等问题。
基于结构光测量技术和3D物体识别技术开发的机器人3D视觉引导系统,可对较大测量深度范围内散乱堆放的零件进行全自由的定位和拾取。
相比传统的2D视觉定位方式只能对固定深度零件进行识别且只能获取零件的部分自由度的位置信息,具有更高的应用柔性和更大的检测范围。可为机床上下料、零件分拣、码垛堆叠等工业问题提供有效的自动化解决方案。
机器视觉3D引导系统框架
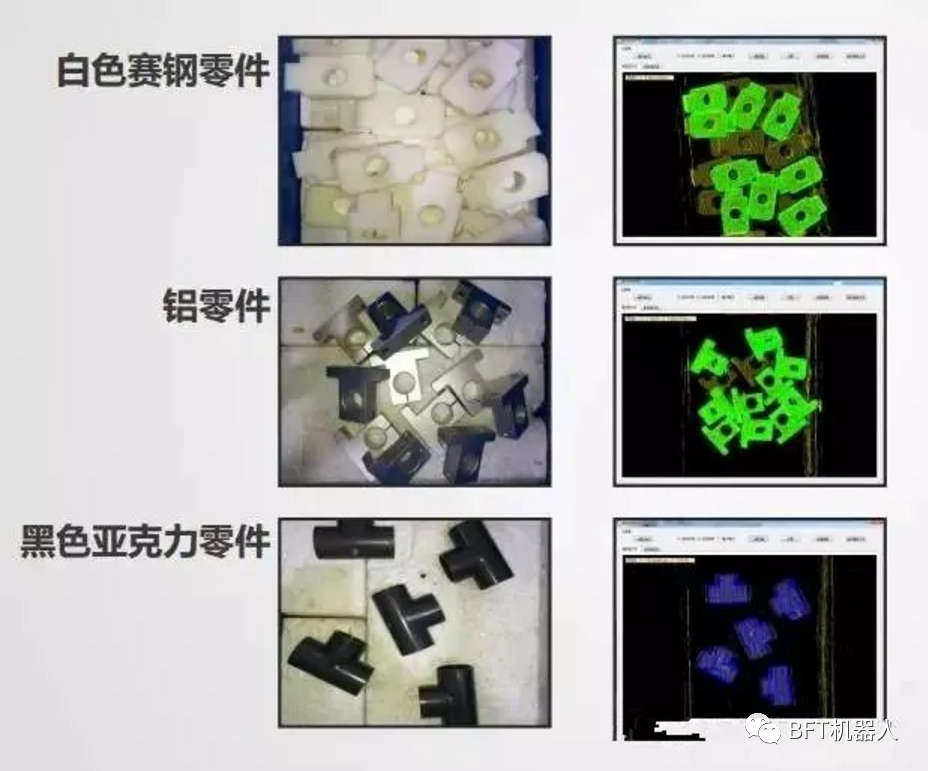
3D扫描仪可获准确并且快速地获取场景的点云图像,通过3D识别算法,可实现在对点云图中的多种目标物体进行识别和位姿估计。
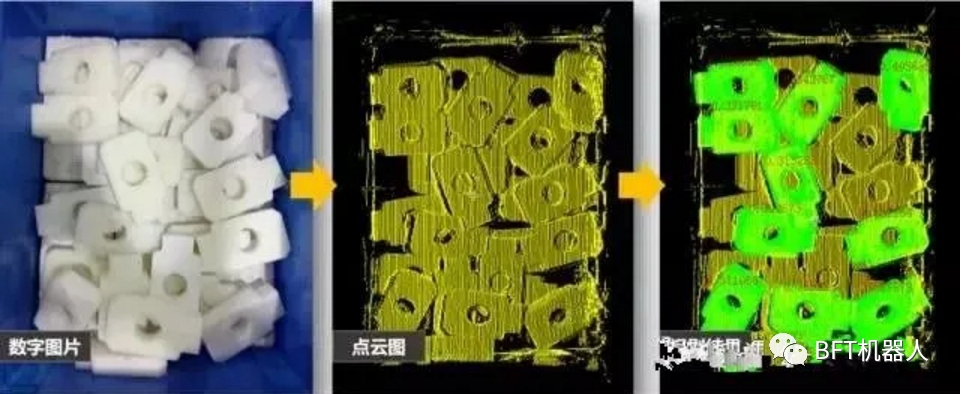
基于重建算法和识别算法,可对不同材质的零件进行稳定的重建和识别,即便是反光比较严重的铝材料及黑色零件都能获得较好的重建和识别效果,可适用于广泛的工业场景。
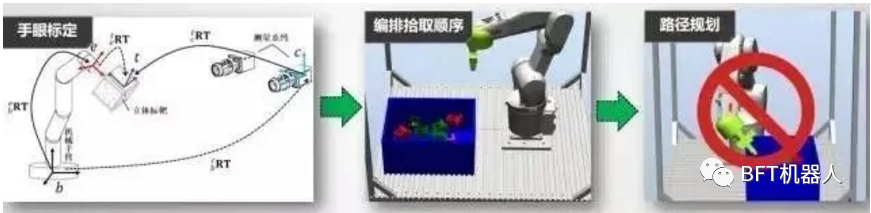
获得零件信息后,要成功拾取零件还需要完成以下几件事:
类似于飞行时间相机、光场相机这类的相机,可以归类为单相机3D成像范围,它们体积小,实时性好,适合随动成像眼在手系统执行3D测量、定位和实时引导。但是,飞行时间相机、光场相机短期内还难以用来构建普通的随动成像眼在手系统,主要原因如下:
1.飞行时间相机空间分辨率和3D精度低,不适合高精度测量、定位与引导。
2.对于光场相机,目前商业化的工业级产品只有为数不多的几家,如德国Raytrix,虽然性能较好,精度适中,但价格贵,使用成本太高。
结构光投影3D系统,精度和成本适中,有较好的应用市场前景。它由若干个相机-投影仪组成的,如果把投影仪当作一个逆向的相机,可以认为该系统是一个双目或多目3D三角测量系统。
被动立体视觉3D成像,目前在工业领域也得到较好应用,但应用场合有限。因为单目立体视觉实现有难度,双目和多目立体视觉要求目标物体纹理或几何特征清晰。
虽然光学3D视觉成像测量方法种类繁多,但能够安装在工业机器人上,组成一种合适的随动成像眼在手系统,对位置变动的目标执行3D成像测量、引导机器人手臂准确定位和实施精准操作的方法有限。
从工业应用的角度来说,我们更关心的是3D视觉传感器的精度、速度、体积与重量。鉴于机器人末端能够承受的端载荷有限,允许传感器占用的空间有限,传感器在满足成像精度的条件下,重量越轻体积越小也就越实用。
对于随动成像眼在手系统,最佳3D成像方法是采用被动单目(单相机)3D成像方法,这样不仅体积小、重量轻,也解决了双目和多目多视图遮挡难题。
来源 | BFT机器人
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。
