效仿人体感觉、神经传递和适应性运动是在人机界面和先进仿生假肢领域开发智能机器人的一个具有挑战性的研究课题。
虽然视觉识别方法已经能够有效地识别形状特征和纹理,但在识别内部软性特征方面存在困难,因此在微创手术、工业取拾和假肢康复等领域应用严重受限。相比之下,基于柔性传感器的触觉感知技术在协助智能机器人实现组织识别、精细运动任务和交互意识方面具有独特优势。通过对对物理刺激敏感的微/纳结构材料和设计的使用,各种传感机制(例如压电、磁性和压阻)的柔性传感器已经应运而生,用于实现对触摸物体的软硬度识别。然而,基于单一传感机制的这些测量策略容易受到环境因素(如非线性摩擦和电干扰)的干扰,从而限制了其感知和测量的准确性。
柔性传感器是一种能够弯曲和适应物体形状的传感器,通常由具有特殊性质的材料制成,例如微/纳结构材料。这些材料对于物理刺激(例如压力、应变、磁场等)非常敏感,可以将这些刺激转换成电信号或其他形式的输出。
在触摸物体的软硬度识别方面,研究人员开始使用各种传感机制来开发柔性传感器。例如,压电传感机制利用压力引起的电荷分布变化来测量触摸的力度和位置,磁性传感机制通过测量磁场的变化来检测物体的变形和压力,而压阻传感机制则是利用电阻的变化来衡量触摸物体的压力。
然而,基于单一传感机制的测量策略存在一些问题。这些问题主要涉及到环境因素对传感器性能的干扰。例如,非线性摩擦是指当物体相对运动时,摩擦力不按线性关系变化,而是随着运动速度、接触面积等因素而变化。这种非线性摩擦会影响传感器对物体力度和位置的准确测量。另外,电干扰也可能影响传感器的准确性,因为外部电磁信号可能干扰传感器的电信号输出。
这些干扰因素可能导致基于单一传感机制的柔性传感器在感知和测量方面的准确性受到限制。为了克服这些限制,研究人员开始探索整合多种传感机制的方法。通过同时使用多种传感机制,传感器可以从不同的角度获得信息,从而更准确地感知和测量物体的软硬度特性。这种多功能传感器系统可以降低环境干扰的影响,提高感知和测量的可靠性。
当人们想要研究或处理软材料(例如豆腐、番茄等)时,通常需要一种方法来衡量它们的软硬程度。本文提出了一种新颖的非侵入性测量方法,用于量化软材料的软硬程度,通过将压电和应变传感模块集成到一个仿生多功能传感系统中。
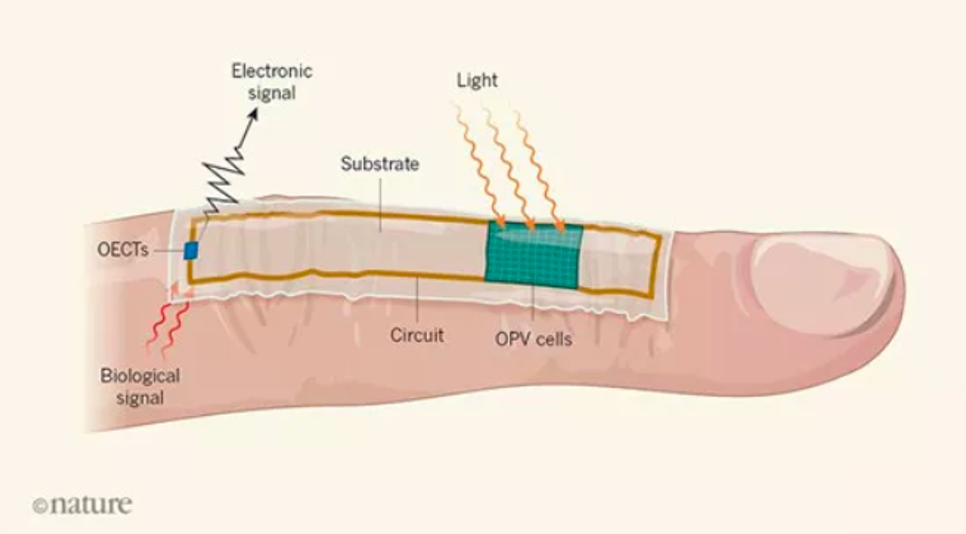
本文构建了一种多功能感知系统,它模仿了人类皮肤的感知功能,并且应用在机器人的人工手指上,使机器人能够感知和分辨不同的触觉刺激。
多感官电子皮肤的设计人类皮肤中的感受器能够辨别各种机械刺激,包括快适应性(FA)感受器和慢适应性(SA)感受器。FA感受器对动态力产生反应,而SA感受器则能够检测静态压力。本研究受到人类皮肤的生理功能启发,将压电模块集成到仿生操纵器中,模仿了FA感受器的感知功能,以便检测高频动态刺激,从而可以通过瞬时脉冲信号初步区分软硬。同时,应用压阻模块来捕获类似于SA感受器的静态刺激,从而实现液态金属传感器在整个压力过程中保持信号,深入解码软硬程度。这种协同效应展示了多功能感知系统在机器人智能分拣方面的潜在潜力,从而在神经假肢、软体机器人和人机交互界面方面开辟了广泛的应用机会。
多感官传感器的性能表征为了模仿人类手的自然智能,本研究设计了一个仿生操纵器,其结构基于手指骨骼的生理结构。这个操纵器可以通过3D打印来制造,并具有指间关节的模式化液态金属传感器,这些传感器能够感知机械刺激。压电传感器位于机器人指尖,用于在机器人接触物体时获取动态信号。压阻应变传感器集成在指关节处,用于获取弯曲信息。指尖的模具基于3D打印技术,通过在模具中倒入PDMS,形成指纹状结构,从而增强粘附和摩擦,改善表面变形。
双模式传感器的感知机制和性能评估压电传感器的感知机制在于施加动态变化的压力时,压电层内分子偶极的重新定向。通过电-机械分析模型可以进一步预测压电模块的压电电压与压力之间的关系。通过有限元分析,可以研究压电薄膜的压电电势。实验结果显示,压电电压随着压力从1.25 kPa增加到5 kPa迅速增加,灵敏度为60 mV/kPa,与有限元分析和理论计算的结果基本一致。压电模式的响应时间为12毫秒。
捕获静态和低频机械刺激对于电子传感器来说也是至关重要的。伸缩应变传感器通过使用基于镓合金的液态合金(Ga: In 75:25 wt %)制造,能够在手指关节处集成,并能够捕获静态压力。当液态合金线的应变增加时,其电阻迅速增加,这个关系在实验测量中得到了验证。该传感器在不同应变下表现出不同的灵敏度。此外,该传感器对长时间的高机械耐久性也有很好的性能。
多功能感知系统的可靠性验证:该研究旨在验证一种多功能感知系统的软度测量可靠性。该系统整合了两种感知机制:压电和应变,用于同时检测动态和静态的机械刺激。在识别过程中,为了实现无痕抓取,首先需要对具有不同杨氏模量(即硬度)的八种标准样本进行初步分类。这些标准样本包括海绵、泡沫、Ecoflex、聚二甲基硅氧烷(PDMS)、乙烯基乙酸乙烯酯(EVA)、聚苯乙烯、橡胶和木材。机械手轻轻触摸各个样本,每次使用相同的接触力和速度,从而导致压电和应变传感信号的同步响应。通过主成分分析方法对多模态信号进行处理,以提取主要特征并降低有效信息的维度。压电信号和应变信号的识别准确度与单一压电信号的识别准确度进行比较,结果表明两种情况的识别准确度非常接近。此外,由于数据库增加,这会消耗更多时间和计算资源。压电电压的峰值测量值明显随物体类型变化,这表明压电信号在检测动态刺激方面起着关键作用,并适合于提供感知反馈来分类软度。
神经网络与深度学习的结合:将神经网络和深度学习与感知系统结合起来,创建机器人的感知和识别能力是一种有效的方法。在这里,设计了一个双流卷积网络,以有效地获取原始复杂信号的时空特征。这归功于两种神经网络的协同效应。此外,本研究中的所有算法都是在TensorFlow中实现的。特别地,机械手接触了具有不同软度的八种类型的物体,每个物体有30组感知信号。收集到的数据被随机打乱,其中60%用作网络的训练数据,40%用作测试数据。通过2D卷积将感知信号转换为即时图像信号进行处理。卷积神经网络利用滑动卷积核提取压电信号的峰值变化。与此同时,GRU被采用来获取压电信号之间的强序列相关性特征。模型的混淆图显示,CNN方法能够帮助机械手实现94.27%以上的软度识别准确率,而从GRU-CNN模型学到的特征进一步将识别准确率提高到98.95%,即使在有限的训练数据下也能实现。可比较的结果表明,两种深度神经网络的协作可以提高训练效率,改善特征之间的交互,从而提高识别准确度。
软度定量判别的步骤:通过压电信号和深度学习的辅助,将八种类型的标准样本区分和分类为四个软度类别(A、B、C、D)。根据初步分类结果,对不同软度类别的标准样本施加不同的接触力,用于后续的软度定量判别。自适应接触力被施加以获得从应变模式到进一步量化软度的相对电阻变化,从而防止由于过度施压而对物体造成永久性损害。静态原理中的测量考虑了物体由于接触力而产生的弹性变形,这通过接触力的弹性变形原理来进行测量,包括应变传感器测得的样本变形以及从力-位移曲线获得的指尖压电传感器的变形。
当谈论软材料的弹性系数时,通常涉及到评估材料的柔软度或弹性程度。本文利用生物启发的多功能传感系统的方法,以一种非侵入性的方式来量化软材料的弹性系数,从而使仿生机械臂能够实现自适应抓取。研究方法首先通过压电信号和修改后的机器学习算法对软材料进行初步分类,准确率达到了98.95%,从而为后续的应变传感反馈量化测量铺平了道路。这种多功能传感模块的协同效应使得机械臂能够识别软硬程度在30 kPa到10 MPa之间的各种软材料,从而在抓取易碎物体(如番茄和豆腐)的精细任务中具备应用机会。作为概念验证的示范,开发出的具有多感知能力和抓取适应性的仿生机械臂成功地集成到机器人手臂中,实现了对新鲜和腐烂橙子的智能分拣。这项研究为无破坏软材料柔软度测量提供了一种策略,并且在智能软体机器人、微创手术和电子假肢等领域具有广泛的应用前景。
总之,这项研究提出了一种基于生物启发的多功能传感系统的方法,用于非侵入性地量化软材料的弹性系数。通过使用压电信号和机器学习算法,可以准确地对软材料进行分类,并通过应变传感反馈进行量化测量。多功能传感模块的协同效应使得机械臂能够识别不同软硬程度的软材料,并在抓取易碎物体的任务中展现出适应性。通过将这一方法应用于机器人手臂中,还实现了对水果的智能分拣任务。这项研究对于智能软体机器人、微创手术和电子假肢等领域具有重要意义,为未来的相关研究和应用提供了有价值的思路和方法。
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。